השרשרת הקינטית והשפעת מדרסים: ניתוח ביומכני של הגפה התחתונה והגב
מבוא
1. מבוא
הבנת התנועה האנושית עברה טרנספורמציה פרדיגמטית בעשורים האחרונים. אם בעבר התמקד האבחון האורתופדי במבנה האנטומי המבודד (הגישה הסטטית), הרי שהיום הגישה השלטת היא הגישה הפונקציונלית, הרואה בגוף רשת מורכבת של שרשראות קינטיות (Kinetic Chains). בשרשרת זו, כף הרגל אינה רק איבר קצה, אלא "לוח הבקרה" המכני והסנסורי של הגוף כולו.
במהלך מחזור הליכה ממוצע, כף הרגל פוגשת את הקרקע כ-5,000 עד 10,000 פעמים ביום. כל מגע כזה מייצר כוחות תגובה מהקרקע (Ground Reaction Forces – GRF) שחייבים להיספג, להיות מנוטרלים או להיות מנותבים הלאה. כאשר המכניקה של כף הרגל לוקה בחסר – למשל במקרים של פרונציה מאוחרת או חוסר יציבות של המפרק התת-טלארי – הכוחות הללו אינם נעלמים; הם מתרגמים למומנטים סיבוביים (Torsional Forces) שעולים במעלה השרשרת הקינטית ופוגעים בברך, בירך ובעמוד השדרה.
אנו שואפים כאן לבחון את המנגנון הביומכני שדרכו מדרסים מותאמים אישית משפיעים על השרשרת הקינטית. ננתח את המושג "שקט ביולוגי" בהקשר של מערכת העצבים האוטונומית, נפרק את הקינמטיקה של הצימוד התנועתי (Coupling Motion), ונסקור את העדויות המחקריות המוכיחות כיצד התערבות בבסיס התמיכה יכולה לרפא פתולוגיות מרוחקות בעמוד השדרה ובברך.
2. הפיזיולוגיה של התיקון: ניהול עומסים ואיזון אוטונומי
אחת התרומות המרכזיות של עבודה זו היא החיבור בין הנדסה מכנית לפיזיולוגיה של מערכת העצבים האוטונומית (ANS).
2.1 המעגל הקטבולי: דומיננטיות סימפטטית ומיקרו-טראומה
במהלך שעות הפעילות, הגוף פועל תחת דומיננטיות של מערכת העצבים הסימפטטית (Sympathetic Nervous System). ברמה התאית, זהו מצב קטבולי (מפרק). כל צעד שאנו מבצעים מייצר עומס מכני על רקמות החיבור – גידים, רצועות וסחוסים. במצב תקין, העומס מייצר "מיקרו-טראומה" פיזיולוגית הכרחית לבנייה מחדש (Nigg et al., 2001).
אולם, בפתולוגיות כמו Plantar Fasciitis (דורבן), נוצר כשל בניהול העומס. כאשר וקטורי הכוח אינם מבוזרים נכון עקב קריסה ביומכנית, רקמה ספציפית סופגת אנרגיה מעבר לסף האלסטיות שלה. התוצאה היא הצטברות של נזק סימפטטי יומיומי שאינו מאפשר לרקמה לחזור למצב של מנוחה אמיתית (Wahmkow et al., 2017).
2.2 המעגל האנבולי: המערכת הפראסימפטטית ויצירת "שקט ביולוגי"
התיקון הרקמתי האמיתי מתרחש בלילה, תחת דומיננטיות פראסימפטטית (Parasympathetic Nervous System). זהו השלב שבו סיבי קולגן חדשים מסונתזים ודלקות מקומיות מטופלות על ידי המערכת החיסונית.
המושג "שקט ביולוגי" מגדיר את המצב שבו המדרס מצליח להוריד את רמת העומס המכני במהלך היום לרמה כזו שהמערכת הפראסימפטטית מסוגלת "לסגור את הגירעון" במהלך הלילה. בקרב מטופלים עם גורמי סיכון (גיל, עישון, סוכרת), יכולת התיקון הלילית מופחתת משמעותית (Gross et al., 2002). לכן, המדרס הופך קריטי: הוא אינו "מרפא" את הדלקת, אלא מפנה את הדרך למערכת התיקון הטבעית על ידי הסרת הגירוי המכני הבלתי פוסק (Johanson et al., 2010).

3. קינמטיקה של כף הרגל: המכניקה של מחזור ההליכה
כדי להבין את השרשרת הקינטית, חובה להבין את הדינמיקה של המפרק התת-טלארי (Subtalar Joint – STJ).
3.1 המפרק התת-טלארי כמתאם משימות
ה-STJ הוא המפרק המורכב ביותר בגפה התחתונה בשל היותו ציר סיבוב תלת-ממדי. במהלך מחזור הליכה תקין, המפרק מבצע שתי פעולות מנוגדות:
- פרונציה (Pronation): מתרחשת ב-25% הראשונים של שלב העמידה (Stance Phase). היא כוללת נטיית עקב (Eversion), כפיפה גבית (Dorsiflexion) והרחקת כף הרגל (Abduction). תפקידה הוא להפוך את כף הרגל ל"מתאם גמיש" (Mobile Adapter) לצורך בלימת זעזועים (Nester et al., 2003).
- סופינציה (Supination): מתרחשת לקראת הדחיפה (Push-off). כאן כף הרגל הופכת ל"מנוף קשיח" (Rigid Lever). עצמות כף הרגל "ננעלות" מכנית כדי לאפשר העברת כוח יעילה קדימה (Tiberio, 1987).
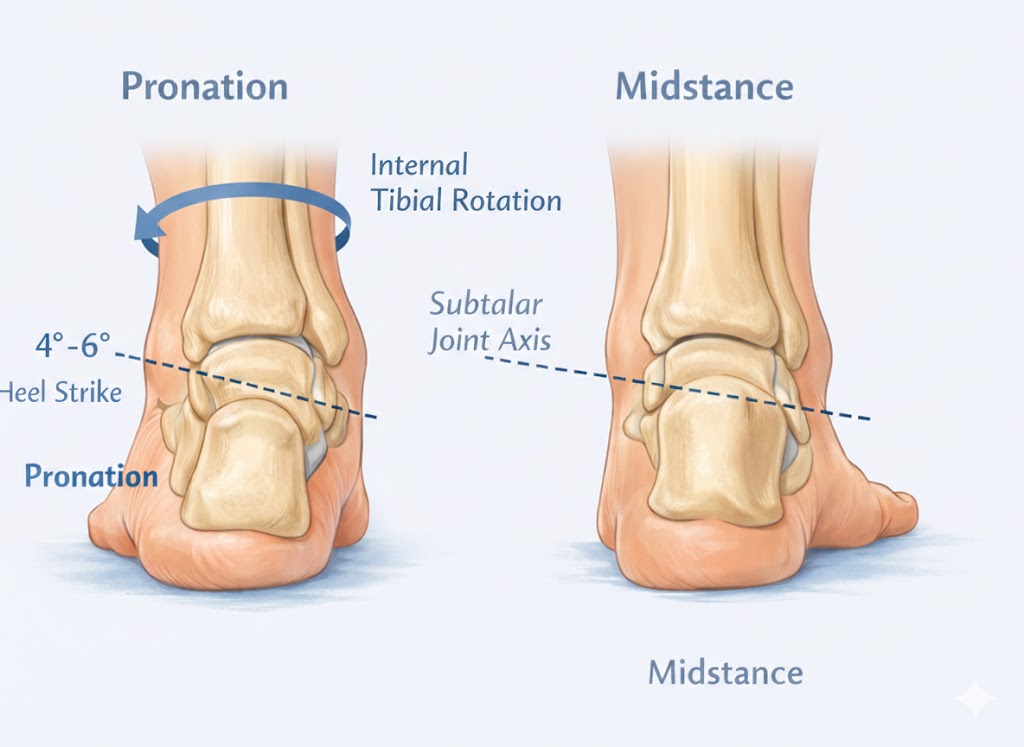
3.2 כשל בקינמטיקה: פרונציה עודפת וממושכת
הבעיה הקלינית המרכזית אינה עצם קיום הפרונציה, אלא תזמונה ועוצמתה. "פרונציה ממושכת" (Prolonged Pronation) גורמת לכך שכף הרגל נשארת במצב גמיש מדי ברגע שבו היא אמורה להיות קשיחה. מחקרים קינמטיים של Desmyttere et al. (2018) הראו כי מדרסים ביומכניים מצליחים להפחית את שיא נטיית העקב בכ-1° עד 3°. במונחים של הנדסה, שינוי קטן זה מפחית משמעותית את המומנט הפועל על ה-Plantar Fascia ומאפשר את תחילת תהליך הריפוי (McCormick et al., 2013).
4. השרשרת הקינטית הסגורה: הצימוד התנועתי (Coupling Motion)
המעבר מכף הרגל לשאר הגוף מתבצע דרך מנגנון הצימוד.
4.1 אינטראקציית כף רגל-שוק (Tibia)
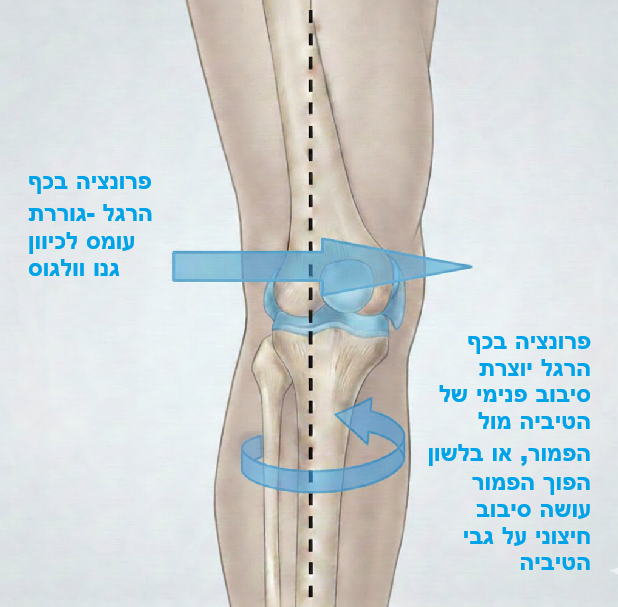
קיימת זיקה מכנית קשיחה בין הפרונציה בכף הרגל לבין הסיבוב הפנימי של עצם השוק. במצב של נשיאת משקל, לא ניתן לבצע פרונציה מבלי שהשוק תסתובב פנימה (Bellchamber & van den Bogert, 2000). מחקרים מצאו יחס של כ-0.5 מעלות סיבוב שוק לכל מעלה של תנועת עקב.

4.2 ההשפעה על מפרק הברך: המעבר לעומסים קינטיים
כאשר השוק מסתובבת פנימה בעוד הירך (Femur) מנסה לשמור על יציבות או מסתובבת פנימה בקצב שונה, נוצר מומנט סיבובי בברך. זהו הבסיס לפתולוגיות של שחיקת סחוס (OA) וכאבים פטלופמורליים (PFPS). מדרס המשנה את האינטראקציה בין כף הרגל לקרקע עשוי להפחית את המומנט המדיאלי בברך (Knee Adduction Moment – KAM) בשיעור של עד 12% (Hinman et al., 2008; 2011). חשוב לציין כי לעיתים השינוי אינו זוויתי (קינמטי) אלא בחלוקת הלחצים הפנימית במפרק (קינטי) (3).
5. האגן ועמוד השדרה: הביומכניקה של כאבי גב תחתון
המעבר מהגפה התחתונה אל ציר הגוף המרכזי מתבצע דרך מפרק הירך והאגן. כאן, השרשרת הקינטית הופכת משרשרת תנועתית לשרשרת יציבתית.
5.1 פרונציה ואסימטריה באגן (Pelvic Tilt)
פרונציה עודפת (Hyperpronation), במיוחד כשהיא א-סימטרית (צד אחד קורס יותר מהשני), מייצרת ירידה תפקודית בגובה הגפה. ירידה זו גוררת הטיה של האגן במישור הפרונטלי (Lateral Pelvic Tilt) והטיה קדמית במישור הסגיטלי (Anterior Pelvic Tilt). מחקרו של Ferguson (2006) הדגים כי הטיה קדמית של האגן מובילה בהכרח להגדלת הלורדוזה המותנית (Lumbar Lordosis). הגדלה זו מעבירה את עומסי הדחיסה מהדיסקים הבין-חולייתיים אל המפרקים הפאסטליים (Facet Joints), מה שיוצר דלקת מכנית וכאב כרוני (9).
5.2 המדרס כגורם מייצב עמוד שדרה
השימוש במדרסים ביומכניים לטיפול בכאבי גב אינו מבוסס על "תמיכה בגב", אלא על איזון הבסיס. מחקר רנדומלי מבוקר (RCT) שנערך על ידי Cambron et al. (2017) על 225 נבדקים, מצא כי הוספת מדרסים מותאמים אישית לתכנית הטיפול הפחיתה את רמת המוגבלות (Oswestry Disability Index) ב-34%. התיקון הזוויתי בקרסול מייצב את מנח האגן, מפחית את הצורך בכיווץ שרירי מגן (Muscle Guarding) של זוקפי הגב ומאפשר למערכת הפרא-סימפטטית להתחיל בתהליכי שיקום רקמתיים באזור המותני (6, 11).
6. המנגנון העצבי-שרירי: המדרס כמערכת משוב (Proprioception)
הגישה הקלאסית ראתה במדרס כלי מכני פסיבי. הגישה המודרנית, המגובה במחקרים נוירו-פיזיולוגיים, רואה בו כלי אקטיבי המשפיע על הבקרה המוטורית (Motor Control).
6.1 גירוי מכנורצפטורים בכף הרגל
כף הרגל גדושה במכנורצפטורים (חיישני לחץ ומתיחה). המדרס, באמצעות מגע רציף ומדויק עם שטחים נרחבים בכף הרגל, משפר את ה"תחושה העמוקה" (Proprioception). מחקרים של Barton et al. (2010) הראו כי גירוי זה מוביל לשינוי בתזמון הגיוס של שרירי ה-Vastus Medialis בברך ושרירי ה-Gluteus Medius בירך.
6.2 שיפור היציבות הדינמית
השיפור בבקרה השרירית מאפשר לגוף "לתכנת מחדש" את תבנית ההליכה. במקום להישען על הרצועות והמפרקים (Passive structures), הגוף משתמש בשרירים (Active structures) כדי לספוג זעזועים. זהו מרכיב קריטי ביצירת ה"שקט הביולוגי", שכן הוא מוריד את העומס המכני הישיר מהרקמות הפגועות ומעביר אותו למערכת השרירית המסוגלת להתמודד איתו (16, 18).
7. שונות בין-אישית ונוקשות מפרקים: הדיון הקליני
אחד הממצאים העקביים ביותר בספרות האקדמית הוא השונות הגבוהה בתגובה למדרסים (Intersubject Variability). הבנת שונות זו היא המפתח להצלחה קלינית, שכן היא מסבירה מדוע פרוטוקול טיפולי מסוים מצליח אצל מטופל אחד ונכשל אצל אחר.
7.1 כף רגל גמישה מול נוקשה (The Rigidity-Flexibility Paradox)
המחקרים של Mills et al. 2010 ושל Wahmkow et al. 2017 מדגישים כי היכולת של מדרס להשפיע קינמטית (לשנות זוויות ומומנטים בברך ובאגן) תלויה בדרגת החופש התנועתית של המפרק התת-טלארי (Subtalar Joint):
- הצלחה ברגל גמישה: במצבים אלו, המפרק מסוגל להגיב לתיקון הזוויתי של המדרס. המדרס מצליח לשנות את וקטור הכוח ולמתן את הסיבוב הפנימי של השוקה (Tibia). השינוי בבסיס עובר הלאה בשרשרת הקינטית ומפחית עומסים בברך ובגב (8, 12).
- מגבלה ברגל סופינטורית נוקשה: במצבים של רגל סופינטורית נוקשה (Rigid Supinated Foot), המבנה המפרקי "נעול" ואינו מסוגל לבצע פרונציה פיזיולוגית לבלימת זעזועים. במקרה זה, המדרס אינו מסוגל לייצר שינוי זוויתי. הניתוח המחקרי של Nigg 2011 מראה כי במצבים אלו המדרס עובד רק דרך חלוקת לחצים (Kinetics) ולעיתים קרובות אינו מצליח להשפיע על כאבי ברך או גב הנובעים מהעברת האימפקט (Shock) ישירות במעלה השלד (29).
7.2 השפעת נוקשות הקרסול (Ankle Equinus)
גורם קריטי נוסף לכישלון מדרסים הוא נוקשות של גיד אכילס ושרירי התאומים (Gastroc-Soleus). מטופלים עם הגבלה ב-Dorsiflexion חייבים לבצע "פרונציה מפצה" כדי לאפשר לגוף להתקדם מעל כף הרגל. מחקרו של Johanson et al. 2010 הוכיח כי אם המדרס מנסה לעצור את הפרונציה הזו מבלי לספק הגבהת עקב (Heel Lift) שתפצה על הנוקשות, העומס עובר מיד כפיצוי לברך או לגב. המדרס חייב לעבוד בסנכרון עם טווחי התנועה הקיימים ולא נגדם (11).
8. ניתוח יעילות קלינית בשרשרת הפרוקסימלית: הברך, הירך והגב
הספרות האקדמית וסקירות קליניות רחבות (Clinical Reviews) מדגישות כי המדרס פועל בצורה המיטבית בפתולוגיות תלויות-תנועה.
8.1 הברך: ניתוח תסמונת הכאב הפטלופמורלי (PFPS)
מקור הכאב בברך נחקר רבות בהקשר של השרשרת הקינטית (Barton et al. 2010):
- המנגנון העולה (Bottom-up): פרונציה מוגברת המייצרת סיבוב שוקה פנימי מוגזם. הסיבוב הזה "מושך" את פיקת הברך ממסלולה ויוצר שחיקה. במקרים אלו המדרס יעיל מאוד (6).
- המנגנון היורד (Top-down): חולשת שרירי ירך פרוקסימליים (Gluteus Medius). המחקר של Powers 2003 מדגיש כי אם המקור הוא חולשת ירך בלבד (הירך קורסת פנימה ללא קשר לכף הרגל), המדרס לא יפתור את הבעיה. עם זאת, ברוב המקרים הקליניים קיימת אינטראקציה – הקריסה מלמעלה מחמירה את הפרונציה מלמטה. לכן הגישה המחקרית המומלצת היא שילוב של מדרסים (לניהול הכוח העולה) יחד עם חיזוק שרירי ירך (לניהול הכוח היורד) (14, 21).
8.2 הירך והאגן: גבולות הגזרה
- הגבלה: כאבי ירך הנובעים מפתולוגיה בתוך המפרק (כמו Labral Tear או שחיקה גרמית באצטבולום) אינם מגיבים למדרסים (9, 26).
- יעילות: המדרס נמצא יעיל בטיפול ב-Trochanteric Bursitis הנובע ממהירות סיבוב (Angular Velocity) גבוהה של הירך פנימה. המדרס אינו משנה את הזווית המבנית של הירך, אלא מווסת את מהירות הקריסה הדינמית (5, 19).
8.3 עמוד השדרה והגב התחתון: ניתוח ביומכני מורחב
הקשר בין כף הרגל לגב התחתון הוא מהקשרים המתועדים ביותר בביומכניקה קלינית. פתולוגיות של כאב גב מכני-תפקודי קשורות ישירות למנח האגן:
- מכניקה של הלורדוזה: פרונציה עודפת (Hyperpronation) גוררת סיבוב פנימי של כל הגפה. סיבוב זה מאלץ את ראש הירך לנוע בתוך המפרק בצורה שגורמת להטיה קדמית של האגן (Anterior Pelvic Tilt).
- עומס על מפרקי הפאסט (Facet Joints): ההטיה הקדמית של האגן מגדילה את הלורדוזה המותנית (Lumbar Lordosis) – הקיעור של הגב התחתון. הגדלת הלורדוזה מעבירה את עומסי הדחיסה מהדיסקים הבין-חולייתיים אל המפרקים הפאסטליים האחוריים. מחקרו של Ferguson 2006 הוכיח כי תיקון הפרונציה באמצעות מדרס מפחית את ההטיה הקדמית של האגן ומביא להקלה משמעותית בעומס על החוליות (9, 18).
- אסימטריה וסקוליוזיס תפקודי: כאשר פרונציה מתרחשת בצד אחד יותר מהשני, נוצרת הטיה צידית של האגן (Lateral Pelvic Tilt), מה שמוביל לסקוליוזיס תפקודי (עקמת זמנית) ולמתח שרירי א-סימטרי בשרירי ה-Erector Spinae וה-Quadratus Lumborum. איזון הבסיס באמצעות מדרס מפחית את הצורך בכיווץ שרירי מגן (Muscle Guarding) ומאפשר "שקט ביולוגי" לרקמות הגב (6, 20, 24).
9. כלי אבחון קליניים: מבחנים מנבאי הצלחה (Clinical Reasoning)
כדי לקבוע האם מדרסים יהיו האסטרטגיה הטיפולית הנכונה, יש לבצע אינטגרציה בין תלונות המטופל למבחנים ביומכניים:
9.1 פרופיל התלונה המכנית (הגרש הקליני)
הסבירות להצלחת מדרסים בבעיות גב וברך גבוהה במיוחד כאשר:
- הכאב מופיע או מחמיר בעמידה והליכה ממושכת (מצבים של עומס מצטבר על השרשרת הקינטית).
- קיימת הקלה משמעותית בישיבה או שכיבה (פריקת העומס מהשרשרת).
- הבעיה מחמירה בימים של פעילות מוגברת על הרגליים ופחות מורגשת בימי מנוחה.
- המטופל מדווח כי סוג הנעל משפיע על רמת הכאב (למשל, כאב גב שפוחת במעבר לנעלי ספורט תומכות).
9.2 "מבחן הספר" (The Wedge Test)
מבחן קליני מיידי המשמש כפרוגנוזה להצלחת המדרס. אם ביצוע סקוואט (Squat) מעורר את הכאב המוכר בברך, בירך או בגב:
- מניחים הגבהה דקה (ספר דק או Wedge) תחת הצד המדיאלי (הפנימי) של כף הרגל.
- במידה וההגבהה המדיאלית מפחיתה את הכאב בזמן הסקוואט – הדבר מעיד על כשל ביומכני "עולה" שהמדרס צפוי לפתור דרך תיקון פרונציה.
- במידה והגבהה לטרלית (Lateral Wedge) היא זו שמקלה על הכאב (נפוץ במצבי שחיקה מדיאלית בברך או ברגליים סופינטוריות) – המדרס יעבוד דרך שינוי וקטור העומס המפרקי (28).
10. סיכום ומסקנות
הצלחת הטיפול במדרסים תלויה בסינרגיה שבין המבנה המכני של כף הרגל לבין הבקרה השרירית והמפרקית מעליה. השרשרת הקינטית היא מערכת דינמית, והמדרס משמש ככלי לוויסות עומסים (Load Management) המאפשר יצירת שקט ביולוגי (Biological Quiet) ושיקום רקמתי מהבסיס ועד לעמוד השדרה.
רשימת מקורות (References)
- Nester CJ et al. Foot orthoses and foot biomechanics. Gait and Posture, 2003.
- Desmyttere G et al. Effect of foot orthoses on lower limb kinematics. Clinical Biomechanics, 2018.
- McCormick CJ et al. Plantar pressure changes with orthoses. J Foot Ankle Res, 2013.
- Hinman RS et al. Lateral wedge insoles for medial knee osteoarthritis. Archives of Phys Med and Rehab, 2008.
- MacLean C et al. Custom foot orthotics and lower extremity kinematics. Clinical Biomechanics, 2006.
- Cambron JA et al. Shoe Orthotics for Chronic Low Back Pain. Archives of Phys Med and Rehab, 2017.
- Nigg BM et al. Soft tissue muscle skeleton in dynamic situations. Journal of Biomechanics, 2001.
- Mills K et al. Foot orthoses and gait: a systematic review. BJSM, 2010.
- Ferguson LW. Foot pronation, pelvic tilt and lumbar lordosis. J of Bodywork and Movement Therapies, 2006.
- Gross KD et al. Flat feet and musculoskeletal pain. Arthritis Care and Research, 2002.
- Johanson MA et al. Custom Foot Orthoses in Subjects with Ankle Equinus. JAPMA, 2010.
- Wahmkow G et al. Arch height and rearfoot kinematics. PLOS ONE, 2017.
- Collins N et al. Foot orthoses in patellofemoral pain syndrome. British Journal of Sports Medicine, 2008.
- Barton CJ et al. Foot orthoses for patellofemoral pain: a systematic review. Sports Medicine, 2010.
- Bellchamber TL and van den Bogert AJ. Lower limb kinematics during walking. Gait and Posture, 2000.
- Tiberio D. Pathomechanics of lower extremity injuries. JOSPT, 1987.
- Levinger P et al. Foot posture and hip kinematics during gait. Gait and Posture, 2010.
- Ferguson LW. The effect of foot pronation on pelvic tilt and lumbar lordosis. J Bodywork Mov Ther, 2006.
- Mundermann A et al. Foot orthoses affect lower extremity kinematics and kinetics during running. Clinical Biomechanics, 2003.
- Reid CR et al. Effect of foot orthotics on pelvic tilt and lumbar lordosis. Journal of Orthopaedic Surgery, 2015.
- Barton CJ et al. Clinical predictors of foot orthoses efficacy. BJSM, 2011.
- Nester CJ. Lessons from evidence-based medicine: foot orthoses and Gait. Journal of Foot and Ankle Research, 2009.
- Richards R et al. A clinical review of foot orthoses in the management of knee osteoarthritis. The Knee, 2015.
- Dananberg HJ. Gait style as an etiology to chronic low back pain. JAPMA, 1993.
- Root ML et al. Normal and Abnormal Function of the Foot. Clinical Biomechanics Corp, 1977.
- Kirby KA. Subtalar joint axis location and foot function. JAPMA, 2000.
- Williams DS et al. Arch structure and injury patterns in runners. Clinical Biomechanics, 2001.
- Telfer S et al. Dose-response effects of customised foot orthoses on lower limb kinematics. Journal of Biomechanics, 2013.
- Nigg BM. Biomechanics of Sport Shoes. Topline Printing, 2011.
- Hosein R et al. Effectiveness of in-shoe orthotic devices of different materials. The Foot, 1997.